Vision-Guided Cobot Beverage System
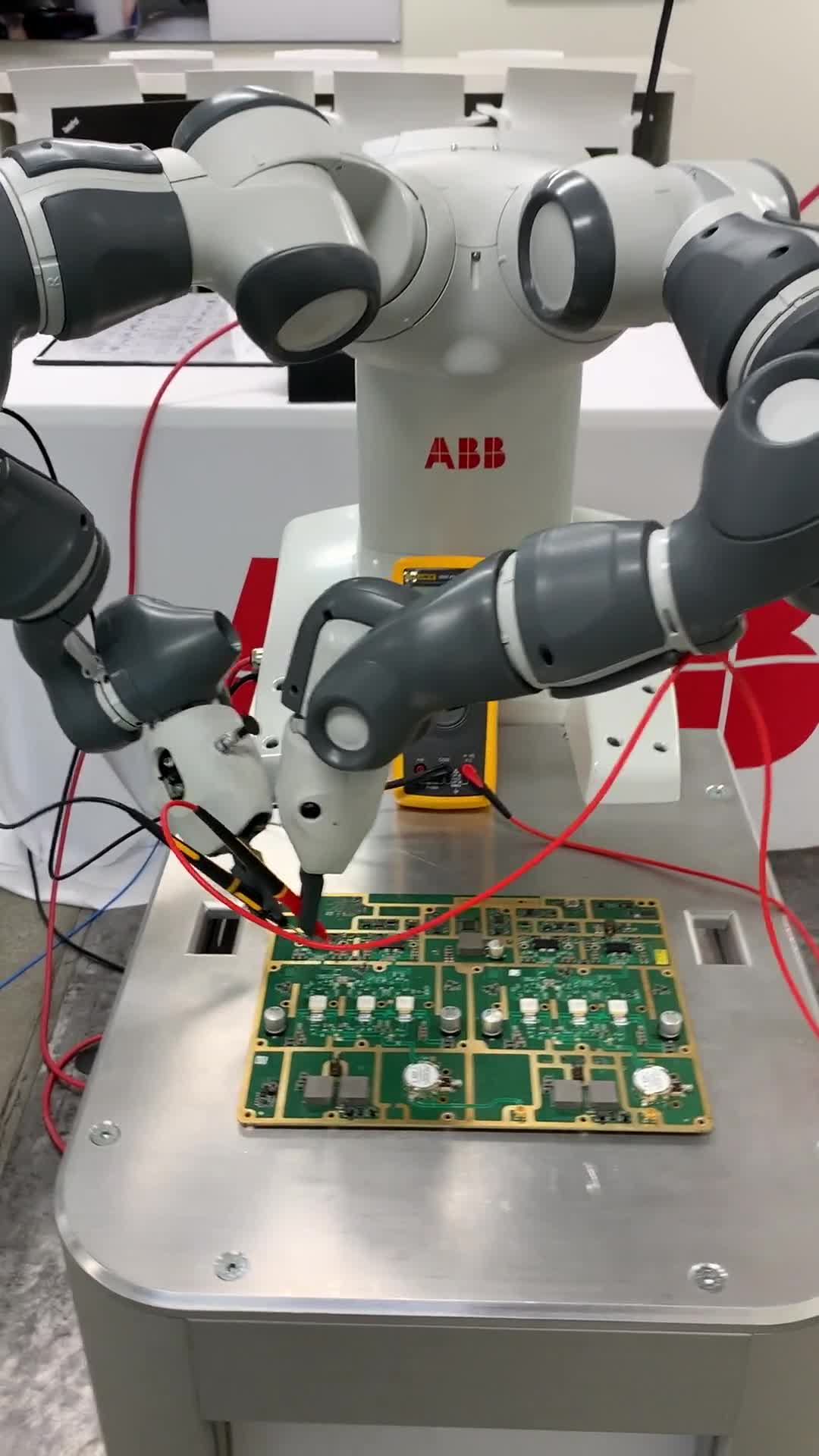
Developed a collaborative robotic beverage automation system using the ABB YuMi to demonstrate precision motion control, vision integration, and adaptive task sequencing.
The system used a camera-based pattern recognition algorithm to identify beverage selection markers beneath each cup. Based on the pattern, the robot autonomously selected the matching espresso pod and completed the brewing sequence.
The project emphasized coordinated dual-arm motion, safe human-robot interaction, and reliable object handling within a dynamic user-facing environment.
Previous