Student Innovation Project (SIP)
At UAT, the Student Innovation Project serves as a capstone experience where students research, design, prototype, validate, and document an original technical project within their degree discipline. My SIP is focused on applying robotics, simulation, and structural validation methods to a real infrastructure inspection challenge.
Subway Sentinel
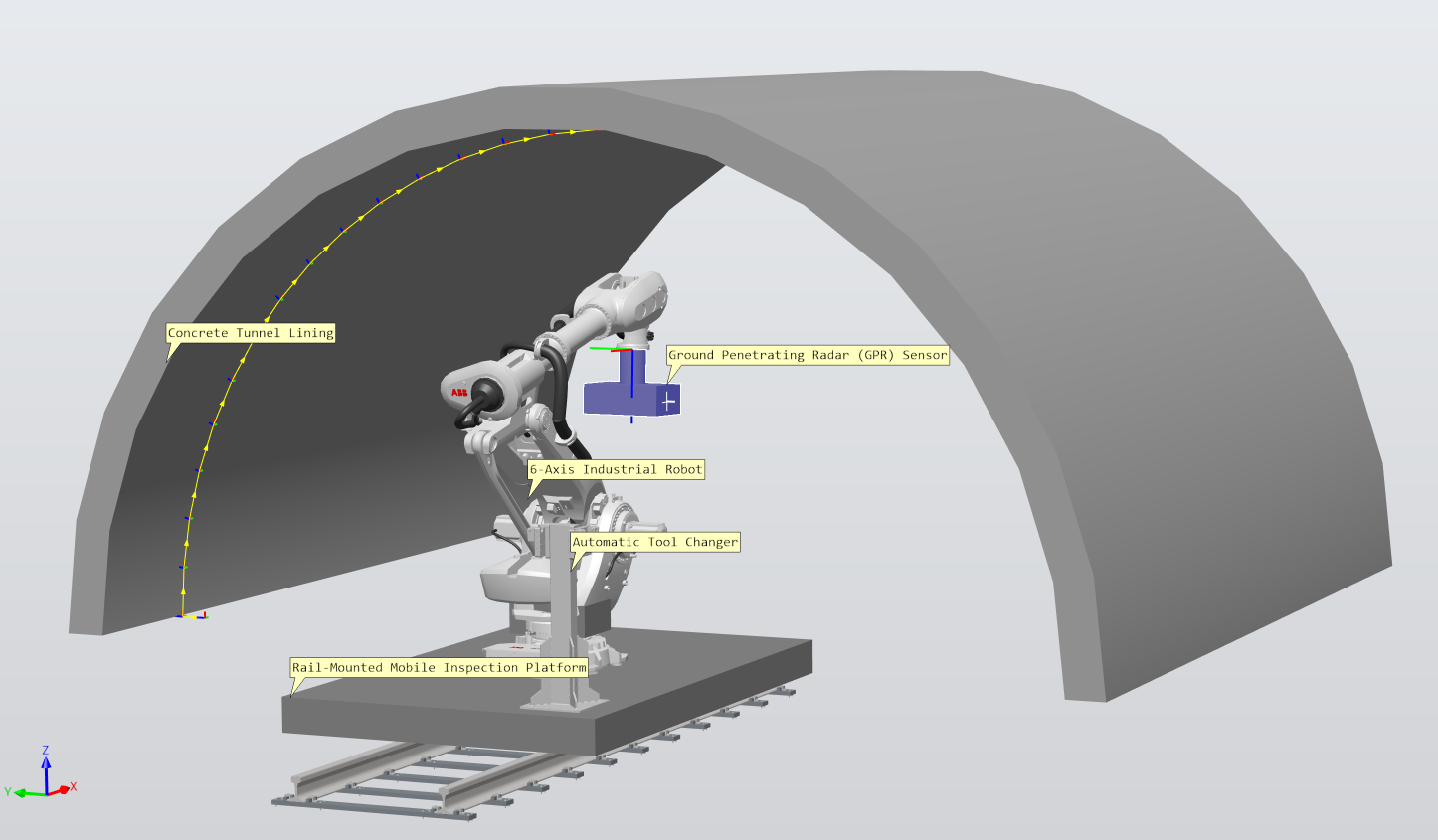
A rail-mounted robotic inspection platform designed to strengthen safety and predictive maintenance across New York City’s aging subway infrastructure—starting with high-resolution Ground Penetrating Radar (GPR) scanning for early detection of subsurface risk.
SIP408 Week 1: Requirements and Assumptions
Subway Sentinel is currently in SIP408 Week 1: Requirements and Assumptions / Design Freeze Start. SIP311 established the project foundation, including the technical field, background research, prior art review, innovation claim, evaluation criteria, goals, MVP scope, and initial RobotStudio/static FEA prototype direction. SIP408 is now focused on converting the approved concept into a functional MVP package through tunnel geometry validation, track gauge assumptions, ABB robot selection, rail platform modeling, load case definition, structural validation, EOAT/GPR integration, and RobotStudio motion validation.
Week 3 will show functional progress, not the full MVP.
The course target is to have the project functional by Week 3 of SIP408. So far, I have laid the foundation for the design by defining the tunnel and track geometry, placing the rail/train reference model, validating the scale and gauge assumptions, selecting the robot, and organizing the major system assumptions. By the end of Week 3, I should be able to show the first functional direction of the project: a rough rail-mounted platform design, a basic GPR EOAT concept, the robot mounted in the inspection layout, and an initial attempt at showing motion or inspection positioning. Full structural FEA, anti-tip validation, refined EOAT design, and complete RobotStudio inspection-cycle evidence will be developed later in SIP408.
Completed So Far
SIP311 established the project foundation and moved Subway Sentinel beyond the idea stage. The current work is now focused on turning that approved concept into documented engineering evidence.
Project Description
Subway Sentinel is a robot that operates on existing subway tracks to help keep New York’s heavily used system safer and in better condition. Built around a rail-mounted platform carrying an industrial robotic arm, the system positions a Ground Penetrating Radar (GPR) unit to scan beneath the track bed and adjacent tunnel interfaces—revealing conditions that are difficult or impossible to verify visually. By enabling repeatable subsurface inspection without requiring personnel to enter hazardous or hard-to-access tunnel environments, Subway Sentinel is designed to support routine scanning and data-driven decisions that protect infrastructure over the long term.
Innovation Claim
The core innovation is the inspection platform itself: a rail-mounted, six-axis industrial robotic system engineered for tunnel environments to deliver precise, repeatable GPR positioning at scale. This approach enables faster, more consistent subsurface inspection than manual methods and reduces operational risk by shifting high-detail scanning to a controlled robotic workflow. The result is safer inspection practices and higher-quality data to support predictive maintenance planning.
Key Features
-
Rail-Integrated Platform Mounts directly to existing subway tracks for stable, corridor-wide inspection without disrupting infrastructure.
-
Precision Robotics Industrial arm enables controlled, repeatable GPR placement for consistent subsurface data acquisition.
-
GPR Subsurface Inspection Detects voids, water intrusion, displacement, ballast degradation, and anomalies beneath track beds and tunnel interfaces.
-
Worker Risk Reduction Reduces the need for manual inspection in confined, hazardous tunnel environments.
-
Scalable Inspection Architecture Designed to support future sensor integration and expanded diagnostic functions.
-
Predictive Maintenance Enablement Provides early detection insights to support data-driven maintenance planning and long-term asset preservation.
Current SIP408 Engineering Focus
Updated May 12, 2026. The current focus is to freeze the assumptions that drive the CAD model, platform geometry, load case, structural validation, and RobotStudio proof-of-concept.
Prototype Roadmap Snapshot
This summary shows the major project phases without turning the Overview page into the full engineering log. The complete week-by-week roadmap and dated updates are tracked on the Engineering Process page.
Design-Phase Prototype
Subway Sentinel is currently being developed as a design-phase prototype using CAD modeling, RobotStudio simulation, and structural validation methods. The MVP focuses on proving that a rail-mounted robotic platform can support controlled GPR positioning within a subway tunnel inspection envelope. During SIP408, the prototype will be validated through geometry, load case definition, static FEA, anti-tip analysis, EOAT/GPR integration, and RobotStudio inspection path simulation.
Engineering Skills Demonstrated
This project is designed to show the technical process behind the concept, not just the final render. The work connects robotics engineering, mechanical design, infrastructure inspection, simulation, and validation into one documented system.
Prototype Visual Overview