Industrial Automation & Robotics Deployment Portfolio
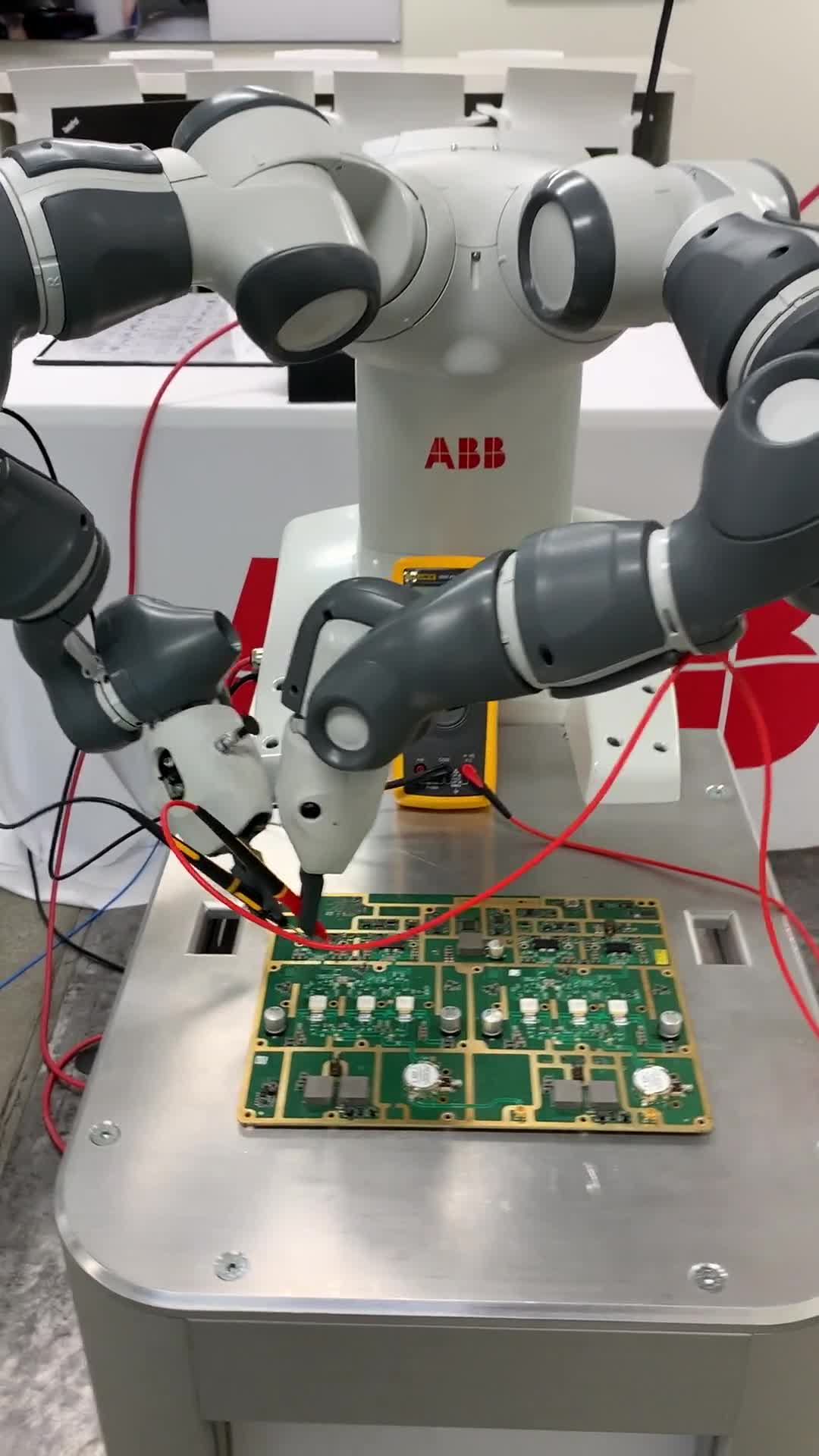
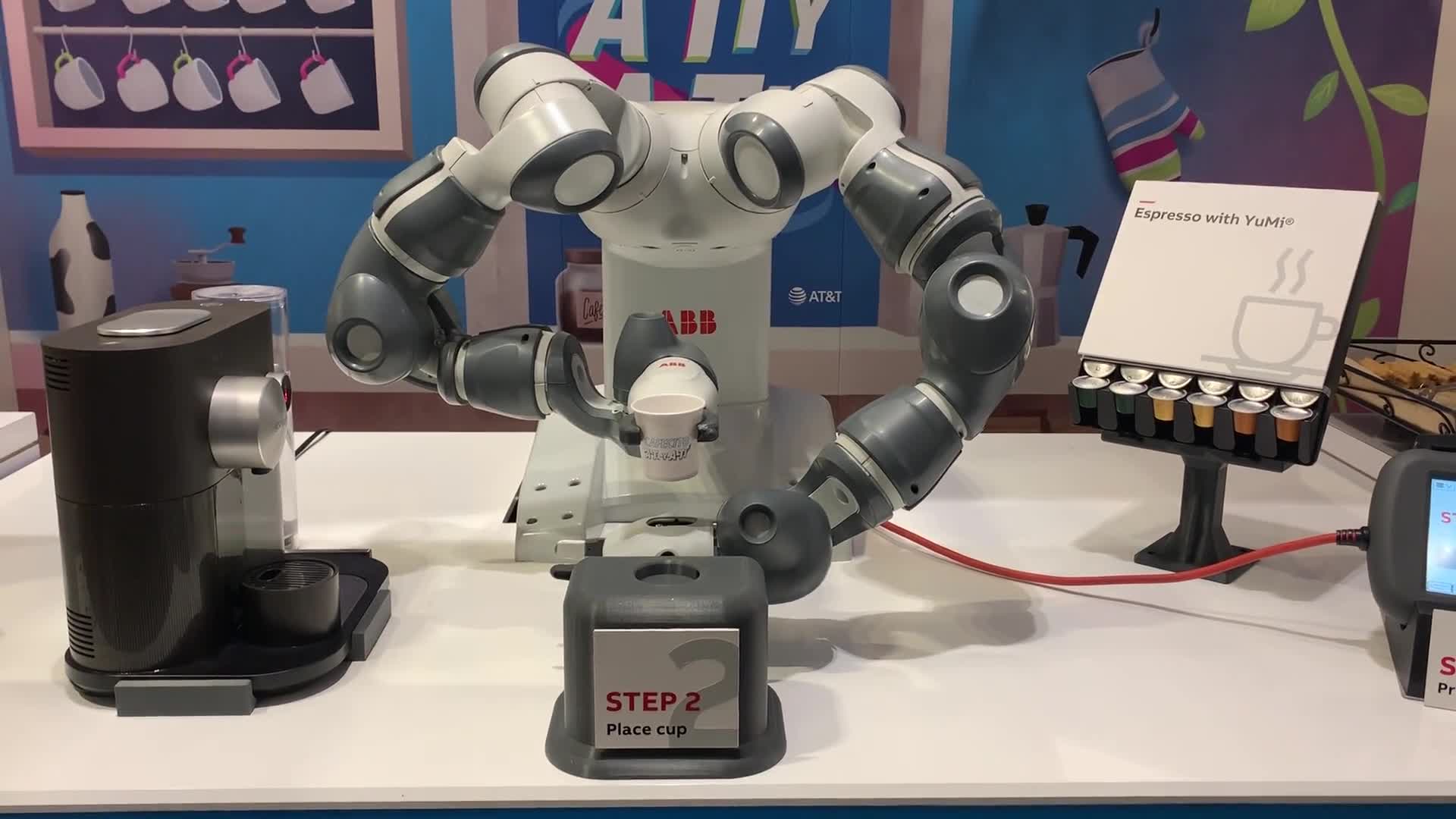
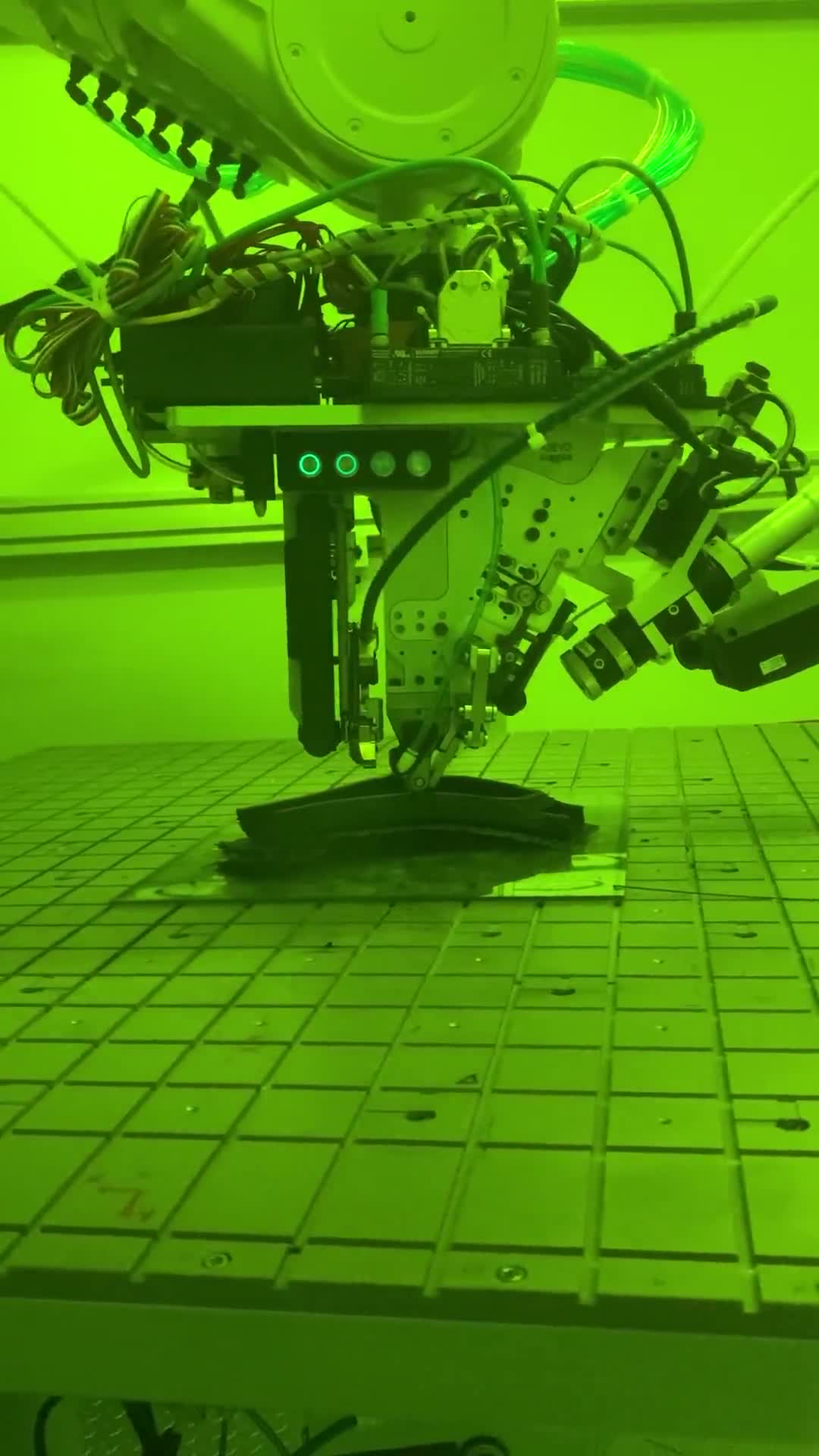
Served as Project Manager for large-scale robotic automation deployment within a Bimbo Bakeries USA distribution facility. Led cross-functional hardware and software engineering teams responsible for robotic integration, commissioning, and operational readiness in a high-volume food production environment.