3D Vision–Guided Bin Picking Automation
Supported the deployment of a 3D vision-guided robotic bin picking system within a high-volume e-commerce fulfillment environment.
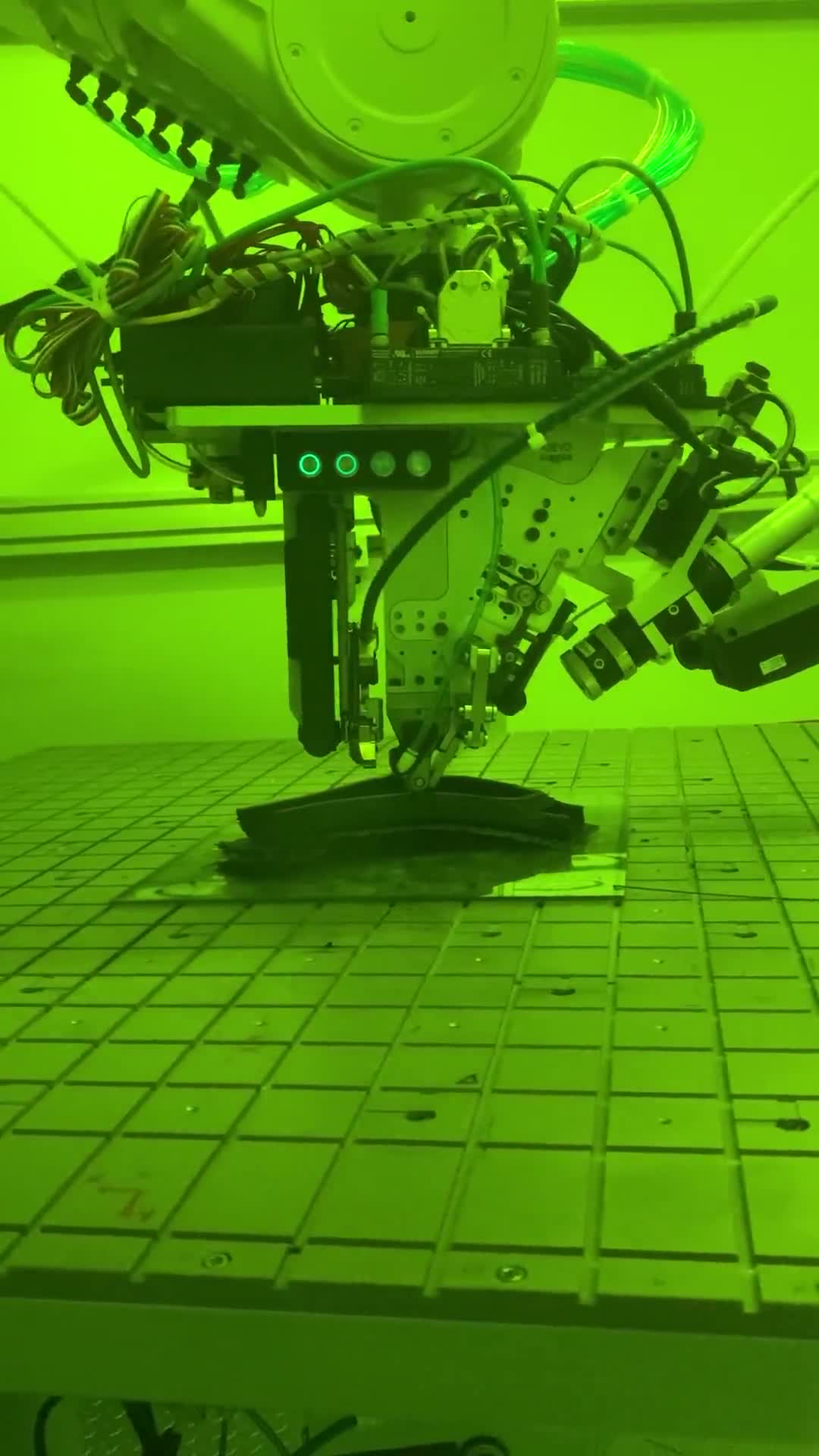
The system utilized a ROS-based 3D perception pipeline to generate six-degree-of-freedom (6-DoF) target poses from scanned package chutes. The robot retrieved individual packages and transferred them to a downstream conveyor for automated processing and routing.
Responsibilities included on-site installation, camera calibration, robot-to-vision alignment, and developing safety logic to ensure reliable, collision-free operation in a dynamic production setting.
The project demonstrated practical integration of perception-driven manipulation, industrial safety controls, and real-world automation deployment at scale.