Autonomous Mobile Cobot System
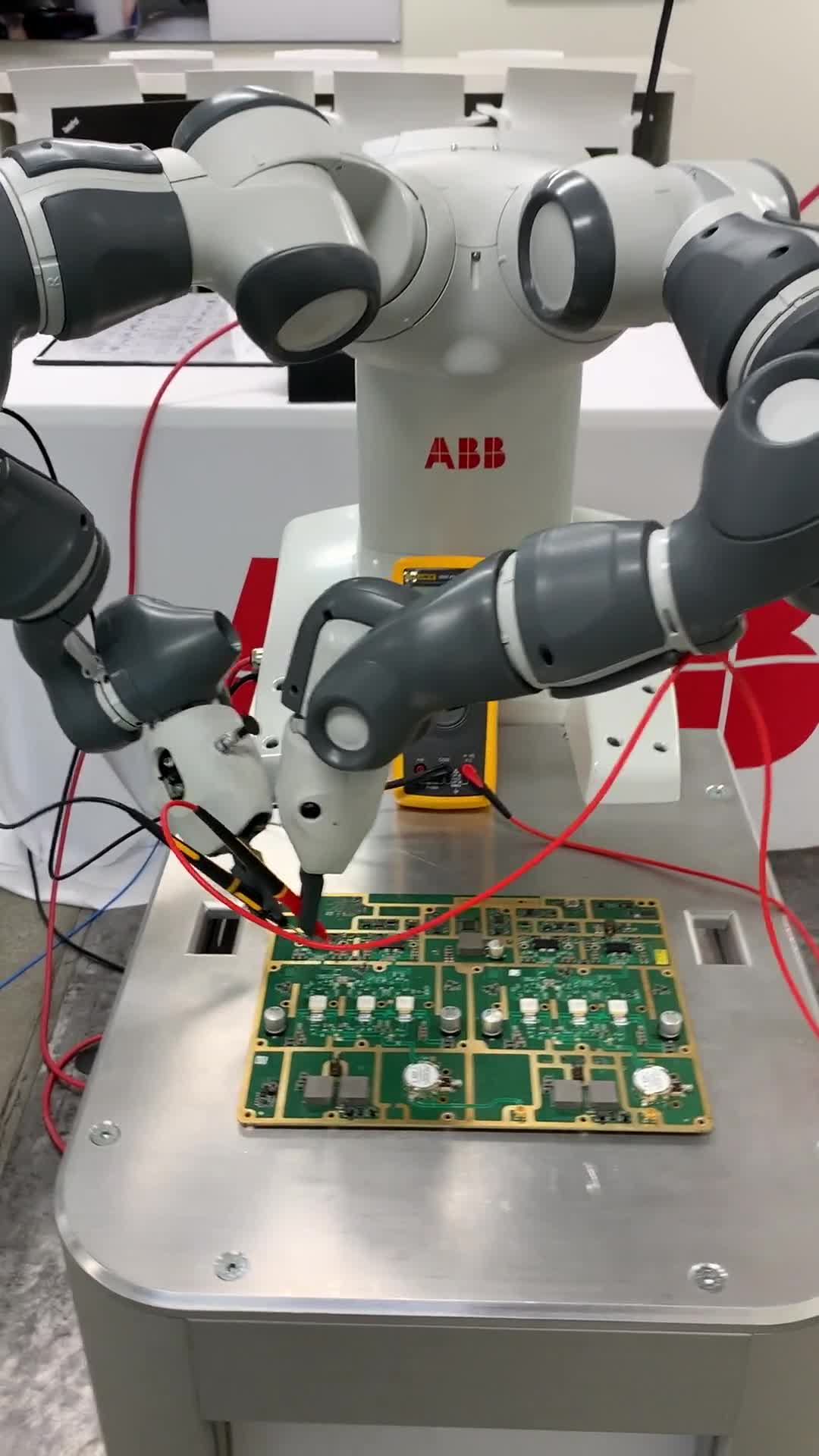
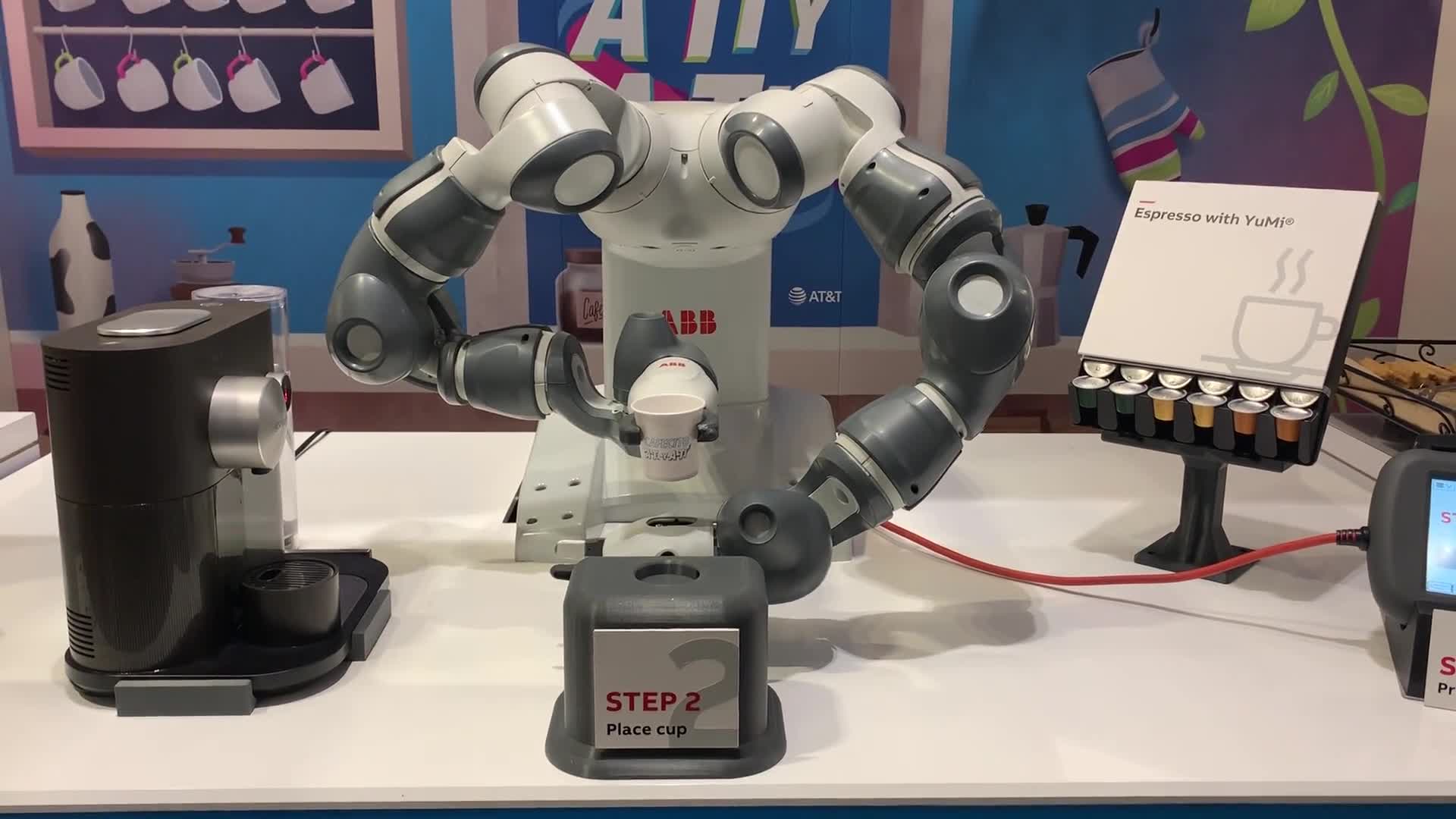
Contributed to the development of an early-stage mobile cobot system combining an ABB YuMi robot with an autonomous guided vehicle (AGV) for flexible material handling within a high-tech manufacturing environment.
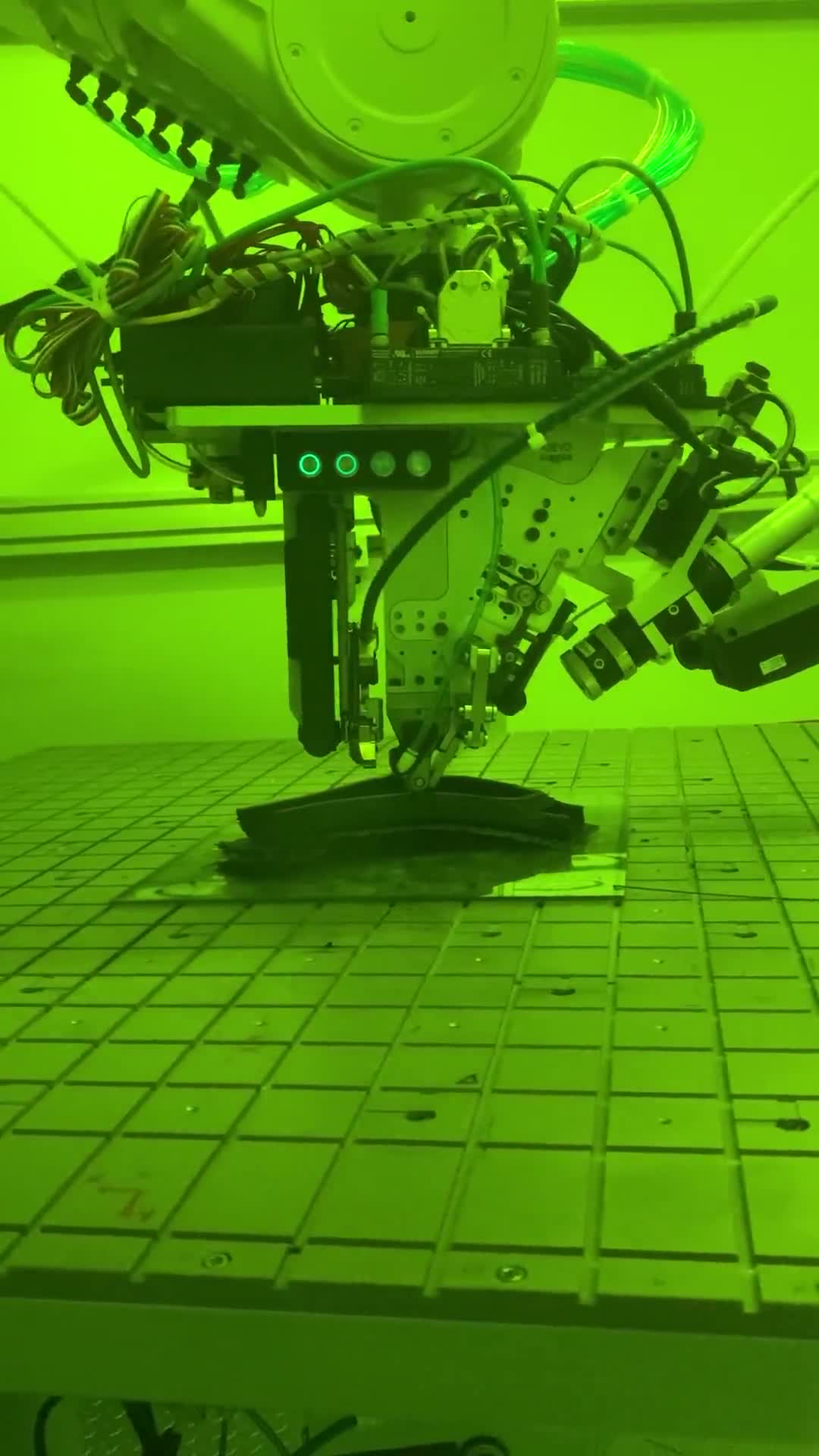
Led robotic motion programming, coordinated multi-axis movement control, and integrated vision systems to enable dynamic pick-and-place operations across multiple workstations. The system used LiDAR navigation for collision avoidance and QR-code localization to establish work object frames for precise positioning.
Responsibilities included camera calibration, motion sequencing, and validating robot-to-platform synchronization to ensure safe, repeatable, and adaptive operation in a shared production space.
Portions of the system demonstration are omitted to comply with client confidentiality requirements.